Į³─ĻüĒ(l©ói)ęĢėX(ju©”)šZ(y©│)⾔╗∙ĄA(ch©│)─Żą═Ż©Vision Language Models, VLMsŻ®į┌ČÓ─ŻæB(t©żi)└ĒĮŌ║═⾼īė┤╬│ŻūR(sh©¬)═Ų└Ē╔Ž⼤Ę┼«É▓╩Ż¼╚ń║╬īóŲõæ¬(y©®ng)⽤ė┌ÖC(j©®)Ų„⼈ęįīŹ(sh©¬)¼F(xi©żn)═©⽤▓┘ū„╩ŪŠ▀╔ĒųŪ─▄Lė“Ą─⼀éĆ(g©©)║╦⼼å¢(w©©n)Ņ}ĪŻ▀@⼀⽬ś╦(bi©Īo)Ą─īŹ(sh©¬)¼F(xi©żn)╩▄ā╔⼤ĻP(gu©Īn)µI╠¶æ(zh©żn)ųŲ╝sŻ║
1. VLM ╚▒╔┘£╩(zh©│n)┤_Ą─ 3D └ĒĮŌ─▄⼒Ż║═©▀^(gu©░)ī”(du©¼)⽐īW(xu©”)┴Ģ(x©¬)ĘČ╩Įė¢(x©┤n)ŠÜĪóāHęį 2D łDŽ± / ⽂▒Šū„×ķ▌ö⼊Ą─ VLM Ą─╠ņ╚╗ŠųŽ▐Ż╗
2. ⽆Ę©▌ö│÷Ą═īė┤╬äė(d©░ng)ū„Ż║īó VLM į┌ÖC(j©®)Ų„⼈öĄ(sh©┤)ō■(j©┤)╔Ž▀M(j©¼n)⾏╬óš{(di©żo)ęįĄ├ĄĮęĢėX(ju©”) - šZ(y©│)⾔ - äė(d©░ng)ū„Ż©VLAŻ®─Żą═╩Ū⼀ĘNėąŪ░Š░Ą─ĮŌøQ⽅░ĖŻ¼Ą½⽬Ū░╚į╩▄ĄĮöĄ(sh©┤)ō■(j©┤)╩š╝»│╔▒Š║═Ę║╗»─▄⼒Ą─Ž▐ųŲĪŻ
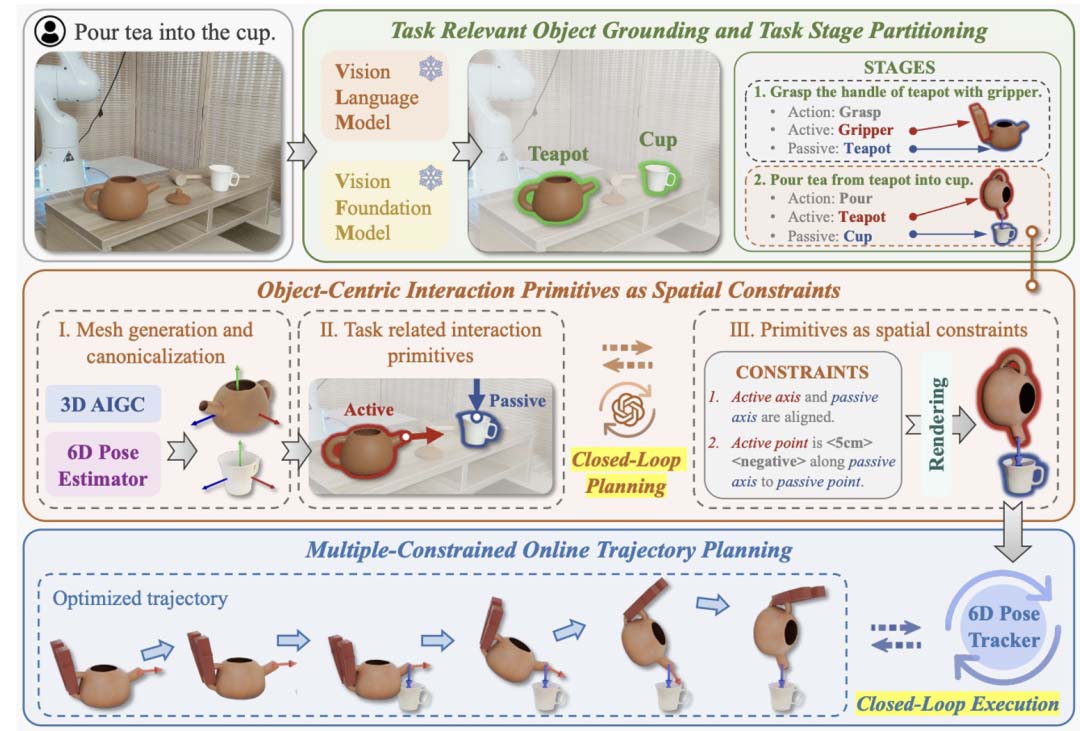
ßśī”(du©¼)╔Ž╩÷ļyŅ}Ż¼▒▒⼤öy⼿ųŪį¬ÖC(j©®)Ų„⼈łF(tu©ón)ĻĀ(du©¼)╠ß│÷┴╦ OmniManip ╝▄śŗ(g©░u)Ż¼╗∙ė┌ęįī”(du©¼)Ž¾×ķųą⼼Ą─ 3D Į╗╗ź╗∙į¬Ż¼īó VLM Ą─Gīė┤╬═Ų└Ē─▄┴”▐D(zhu©Żn)╗»×ķÖC(j©®)Ų„⼈Ą─Ą═īė┤╬GŠ½Č╚äė(d©░ng)ū„ĪŻ
ßśī”(du©¼)⼤─Żą═╗├ėX(ju©”)å¢(w©©n)Ņ}║═šµīŹ(sh©¬)Łh(hu©ón)Š│▓┘ū„Ą─▓╗┤_Č©ąįŻ¼OmniManip äō(chu©żng)ą┬ąįĄžę²⼊┴╦ VLM ęÄ(gu©®)äØ║═ÖC(j©®)Ų„⼈ł╠(zh©¬)⾏Ą─ļpķ]Łh(hu©ón)ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)Ż¼īŹ(sh©¬)¼F(xi©żn)┴╦▓┘ū„ąį─▄Ą─’@ų°═╗ŲŲĪŻ
īŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹▒Ē├„Ż¼OmniManip ū„×ķ⼀ĘN├Ōė¢(x©┤n)ŠÜĄ─ķ_(k©Īi)Ę┼į~ģR▓┘ū„⽅Ę©Ż¼į┌Ė„ĘNÖC(j©®)Ų„⼈▓┘ū„╚╬äš(w©┤)ųąŠ▀éõÅŖ(qi©óng)⼤Ą─┴Ńśė▒ŠĘ║╗»─▄⼒ĪŻ
OmniManip Ą─ĻP(gu©Īn)µIįO(sh©©)ėŗ(j©¼)░³└©Ż║
╗∙ė┌ VLM Ą─╚╬äš(w©┤)ĮŌ╬÷Ż║└¹⽤ VLM ÅŖ(qi©óng)⼤Ą─│ŻūR(sh©¬)═Ų└Ē─▄⼒Ż¼īó╚╬äš(w©┤)ĘųĮŌ×ķČÓéĆ(g©©)ĮY(ji©”)śŗ(g©░u)╗»ļAČ╬Ż©StagesŻ®Ż¼├┐éĆ(g©©)ļAČ╬├„┤_ųĖČ©┴╦ų„äė(d©░ng)╬’¾wŻ©ActiveŻ®Īó▒╗äė(d©░ng)╬’¾wŻ©PassiveŻ®║═äė(d©░ng)ū„ŅÉ(l©©i)ą═Ż©ActionŻ®ĪŻ
ęį╬’¾w×ķųą⼼Ą─Į╗╗ź╗∙į¬ū„×ķ┐šķg╝s╩°Ż║═©▀^(gu©░) 3D ╗∙ū∙─Żą═⽣│╔╚╬äš(w©┤)ŽÓĻP(gu©Īn)╬’¾wĄ─ 3D ─Żą═║═ęÄ(gu©®)ĘČ╗»┐šķgŻ©canonical spaceŻ®Ż¼╩╣ VLM ─▄ē“ų▒Įėį┌įō┐šķgųą▓╔śė 3D Į╗╗ź╗∙į¬Ż¼ū„×ķ Action Ą─┐šķg╝s╩°Ż¼Å─⽽ā×(y©Łu)╗»Ū¾ĮŌ│÷ Active ╬’¾wį┌ Passive ╬’¾węÄ(gu©®)ĘČū°ś╦(bi©Īo)ŽĄŽ┬Ą─⽬ś╦(bi©Īo)Į╗╗źū╦æB(t©żi)ĪŻ
ķ]Łh(hu©ón) VLM ęÄ(gu©®)äØŻ║īó⽬ś╦(bi©Īo)Į╗╗źū╦æB(t©żi)Ž┬Ą─ Active/Passive ╬’¾wõų╚Š│╔łDŽ±Ż¼ė╔ VLM įu(p©¬ng)╣└┼cųž▓╔śėŻ¼īŹ(sh©¬)¼F(xi©żn) VLM ī”(du©¼)⾃╔ĒęÄ(gu©®)äØĮY(ji©”)╣¹Ą─ķ]Łh(hu©ón)š{(di©żo)š¹ĪŻ
ķ]Łh(hu©ón)ÖC(j©®)Ų„⼈ł╠(zh©¬)⾏Ż║═©▀^(gu©░)╬’¾w 6D ū╦æB(t©żi)Ė·█ÖŲ„īŹ(sh©¬)Ģr(sh©¬)Ė³ą┬ Active/Passive ╬’¾wĄ─╬╗ū╦Ż¼▐D(zhu©Żn)ōQ×ķÖC(j©®)ąĄ▒█─®Č╦ł╠(zh©¬)⾏Ų„Ą─▓┘ū„▄ē█EŻ¼īŹ(sh©¬)¼F(xi©żn)ķ]Łh(hu©ón)ł╠(zh©¬)⾏ĪŻ
╬’¾wĄ─Į╗╗ź╗∙į¬═©▀^(gu©░)Ųõį┌ś╦(bi©Īo)£╩(zh©│n)┐šķgųąĄ─Į╗╗ź³c(di©Żn)║═⽅Ž“üĒ(l©ói)▒Ēš„ĪŻĮ╗╗ź³c(di©Żn) pĪ╩R3 ▒Ē╩Š╬’¾w╔ŽĻP(gu©Īn)µIĄ─Į╗╗ź╬╗ų├Ż¼⽽Į╗╗ź⽅Ž“ vĪ╩R3 ┤·▒Ē┼c╚╬äš(w©┤)ŽÓĻP(gu©Īn)Ą─ų„ę¬▌SĪŻ▀@ā╔š▀╣▓═¼śŗ(g©░u)│╔Į╗╗ź╗∙į¬ O={p,v}Ż¼ĘŌčb┴╦ØM(m©Żn)⾜╚╬äš(w©┤)╝s╩°╦∙ąĶĄ─╗∙▒Š⼏║╬║═╣”─▄ī┘ąįĪŻ▀@ą®ś╦(bi©Īo)£╩(zh©│n)Į╗╗ź╗∙į¬ŽÓī”(du©¼)ė┌Ųõś╦(bi©Īo)£╩(zh©│n)┐šķgČ©┴xŻ¼─▄ē“į┌▓╗═¼ł÷(ch©Żng)Š░ųą▒Ż│ų⼀ų┬Ż¼īŹ(sh©¬)¼F(xi©żn)Ė³═©⽤║═┐╔ųž⽤Ą─▓┘ū„▓▀┬įĪŻ
ī”(du©¼)ė┌═©⽤╬’¾wĄ─Į╗╗ź³c(di©Żn)╠ß╚ĪŻ¼OmniManip └¹⽤ęĢėX(ju©”)šZ(y©│)⾔─Żą═Ż©VLMŻ®į┌įŁłDŻ©«ö(d©Īng)▓┐╝■┐╔⻅ŪęīŹ(sh©¬)¾w┤µį┌Ģr(sh©¬)Ż®╗“į┌š²Į╗ęĢłDųąõų╚ŠĄ─ 3D ⽹Ė±Ż©«ö(d©Īng)▓┐╝■▓╗┐╔⻅╗“?q©▒)Ź¾w▓╗┤µį┌Ģr(sh©¬)Ż®╔Ž▀M(j©¼n)⾏Č©╬╗ĪŻ
┼c CoPa ║═ ReKep Ą╚⽅Ę©▓╗═¼Ż¼OmniManip ų▒Įėūī VLM ▀M(j©¼n)⾏ groundingŻ¼▓╗Ģ■(hu©¼)╩▄Ž▐ė┌▓╗ĘĆ(w©¦n)Č©Ą─ part ĘųĖŅ╗“Š█ŅÉ(l©©i)ĮY(ji©”)╣¹ĪŻ
į┌Į╗╗ź⽅Ž“Ą─▓╔śė⽅⾯Ż¼ė╔ė┌╬’¾wĄ─ęÄ(gu©®)ĘČ╗»┐šķg═©▀^(gu©░) Omni6DPose Õ^Č©Ż¼▌SĄ─⽅Ž“┼cšZ(y©│)┴xī”(du©¼)⻬Ż¼įōłF(tu©ón)ĻĀ(du©¼)ūī VLM ų▒Įėī”(du©¼)╬’¾wś╦(bi©Īo)£╩(zh©│n)┐šķgĄ─▌S▀M(j©¼n)⾏šZ(y©│)┴x├Ķ╩÷Ż¼▓óĖ∙ō■(j©┤)▓┘ū„╚╬äš(w©┤)▀M(j©¼n)⾏Ųź┼õČ╚┼┼ą“Ż¼ęį½@Ą├Į╗╗ź⽅Ž“Ą─║“▀xĪŻ
ļpķ]Łh(hu©ón)ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)
└Ņ⻜⻜łF(tu©ón)ĻĀ(du©¼)Ą─⼯ū„ ReKep ═©▀^(gu©░)ĻP(gu©Īn)µI³c(di©Żn)Ė·█ÖŪ╔├ŅĄžīŹ(sh©¬)¼F(xi©żn)┴╦ÖC(j©®)ąĄ▒█Ą─ķ]Łh(hu©ón)ł╠(zh©¬)⾏Ż¼Ą½Ųõ VLM ęÄ(gu©®)äØ▀^(gu©░)│╠╩Ūķ_(k©Īi)Łh(hu©ón)Ą─ĪŻOmniManip ätĖ³▀M(j©¼n)⼀▓ĮŻ¼Ą├ęµė┌ęį╬’¾w×ķųą⼼Ą─įO(sh©©)ėŗ(j©¼)└Ē─ŅŻ¼⾸┤╬į┌ VLM ęÄ(gu©®)äØ║═ÖC(j©®)ąĄ▒█ł╠(zh©¬)⾏īė⾯īŹ(sh©¬)¼F(xi©żn)┴╦ļpķ]Łh(hu©ón)ŽĄĮy(t©»ng)Ż║
ķ]Łh(hu©ón)ęÄ(gu©®)äØŻ║į┌īŹ(sh©¬)“×(y©żn)ųąŻ¼VLM ═Ų└Ē║▄╚▌ęū│÷¼F(xi©żn)╗├ėX(ju©”)Ż¼ī¦(d©Żo)ų┬Õe(cu©░)š`Ą─ęÄ(gu©®)äØĮY(ji©”)╣¹Ż©ė╚Ųõ╩Ūį┌╔µ╝░ 3D ą²▐D(zhu©Żn)Ą─╚╬äš(w©┤)ųąŻ¼╚ńĄ╣⽔Īó▓Õ╣PŻ®ĪŻOmniManip ┘xėĶ VLM ķ]Łh(hu©ón)ęÄ(gu©®)äØ─▄⼒Ż¼═©▀^(gu©░)õų╚Š╬’¾wĄ─╚²ŠS─Żą═Ż¼Ä═ų· VLM ĪĖ─Xča(b©│)Ī╣│÷ęÄ(gu©®)äØĮY(ji©”)╣¹║¾Ą─╬’¾wśė├▓Ż¼į┘┼ąöÓŲõ║Ž└ĒąįĪŻ
▀@⼀╣”─▄┘xėĶ┴╦ VLM ┐šķgĘ┤╦╝─▄⼒Ż¼╩╣Ųõ─▄ē“į┌£y(c©©)įćĢr(sh©¬)▀M(j©¼n)⾏═Ų└ĒŻ¼ŅÉ(l©©i)╦Ųė┌ OpenAI Ą─ O1Ż¼⼤⼤╠ß⾼┴╦▓┘ū„│╔╣”┬╩ĪŻ×ķ┴╦▒Ż│ų┐“╝▄Ą─║å(ji©Żn)ØŹąįŻ¼čąŠ┐łF(tu©ón)ĻĀ(du©¼)ø](m©”i)ėąįO(sh©©)ėŗ(j©¼)Å═(f©┤)ļsĄ─£y(c©©)įćĢr(sh©¬)═Ų└Ē┴„│╠Ż¼āHū„⼀▌åąŻ“×(y©żn)Š═ęč├„’@╠ß⾼┴╦ VLM Ą─ęÄ(gu©®)äØ£╩(zh©│n)┤_┬╩ĪŻ
ķ]Łh(hu©ón)ł╠(zh©¬)⾏Ż║OmniManip ╠ß╚ĪĄ─Į╗╗ź╗∙į¬╬╗ė┌╬’¾wĄ─ęÄ(gu©®)ĘČ┐šķgųąŻ¼ų╗ąĶę²⼊⼀éĆ(g©©) 6D ╬╗ū╦Ė·█ÖŲ„╝┤┐╔▌p╦╔īŹ(sh©¬)¼F(xi©żn)ķ]Łh(hu©ón)▓┘ū„ĪŻ┼c ReKep ╩╣⽤Ą─ĻP(gu©Īn)µI³c(di©Żn)Ė·█ÖŲ„ŽÓ⽐Ż¼╗∙ė┌╬’¾wĄ─ 6D ╬╗ū╦Ė·█Ö⽅╩ĮĖ³×ķĘĆ(w©¦n)Č©Ż¼▓óī”(du©¼)š┌ō§Š▀ėąĖ³ÅŖ(qi©óng)Ą─¶ö░¶ąįĪŻŻ©╚▒³c(di©Żn)ät╩Ū▓╗╚ńĻP(gu©Īn)µI³c(di©Żn)ņ`╗ŅĪó⽆Ę©Į©─Ż╚ßąį╬’¾w▓┘ū„ĪŻŻ®
©ģīŹ(sh©¬)“×(y©żn)ĮY(ji©”)╣¹
ÅŖ(qi©óng)⼤Ą─ķ_(k©Īi)Ę┼į~ģR▓┘ū„ąį─▄
į┌ 12 éĆ(g©©)šµÖC(j©®)Č╠│╠╚╬äš(w©┤)╔ŽŻ¼OmniManip Š∙š╣¼F(xi©żn)│÷▓╗Õe(cu©░)Ą─ąį─▄ĪŻ
ļpķ]Łh(hu©ón)ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)×ķ OmniManip ĦüĒ(l©ói)┴╦╝s 17% Ą─ąį─▄╠ß╔²Ż¼▀@ūC├„┴╦ RRC į┌ėąą¦£p╔┘⼤─Żą═╗├ėX(ju©”)ė░Ēæ⽅⾯Ą─ū„⽤ĪŻ
Į╗╗ź╗∙į¬Ą─¶ö░¶ąį
VLM ąĶę¬╗∙ė┌Į╗╗ź╗∙į¬ī”(du©¼)ÖC(j©®)Ų„⼈▓┘ū„▀M(j©¼n)⾏ęÄ(gu©®)äØŻ¼╚ń╣¹Į╗╗ź╗∙į¬▒Š╔Ē┤µį┌å¢(w©©n)Ņ}Ż¼VLM Š═Ģ■(hu©¼)Ž▌⼊ĪĖŪ╔ŗDļy×ķ⽆⽶ų«┤ČĪ╣Ą─└¦Š│ĪŻę“┤╦Ż¼┐╔┐┐Ą─Į╗╗ź╗∙į¬⾄ĻP(gu©Īn)ųžę¬ĪŻęį═∙Ą─⽅Ę©═©│Ż╩Ūūī VLM ų▒Įėį┌ŽÓÖC(j©®)┼─özĄ─ 2D łDŽ±╔Ž▓╔śėĮ╗╗ź╗∙į¬Ż¼╚╗║¾═©▀^(gu©░)ŽÓÖC(j©®)Ą─ā╚(n©©i)═ŌģóöĄ(sh©┤)▐D(zhu©Żn)ōQĄĮ 3D ┐šķgĪŻ
╚╗⽽Ż¼ė╔ė┌ 2D łDŽ±┤µį┌┐šķgŲń┴xŻ¼▓╔śėą¦╣¹ī”(du©¼)ŽÓÖC(j©®)ęĢ⻆ĪółDŽ±╝y└Ē║═▓┐╝■ą╬ĀŅĄ╚ę“╦žJ×ķ├¶ĖąŻ©└²╚ńŻ¼«ö(d©Īng)ŽÓÖC(j©®)ŲĮęĢ▒Ł⼦Ģr(sh©¬)Ż¼ų«Ū░Ą─⽅Ę©ų╗─▄ī”(du©¼)£╩(zh©│n)▒Ł⼦Ą─é╚(c©©)▒┌Īó⽽▓╗╩Ūķ_(k©Īi)⼝Ż®ĪŻ⽽ OmniManip ät╩Ūį┌╬’¾wĄ─ 3D ęÄ(gu©®)ĘČ┐šķgųą▀M(j©¼n)⾏▓╔śėŻ¼─▄ē“▌p╦╔┐╦Ę■ 2D łDŽ±Ą─ŠųŽ▐ąįŻ¼īŹ(sh©¬)¼F(xi©żn)┐╔┐┐Ą─ 3D Į╗╗ź╗∙į¬╠ß╚ĪĪŻ
ÅŖ(qi©óng)⼤Ą─═žš╣ąį┼cØō⼒
OmniManip ─▄ē“┼c high-level ╚╬äš(w©┤)ęÄ(gu©®)äØŲ„ĮY(ji©”)║ŽŻ¼īŹ(sh©¬)¼F(xi©żn)⻓│╠╚╬äš(w©┤)▓┘ū„
ū„×ķ⼀ĘNęį╬’¾w×ķųą⼼Ą─╦ŃĘ©Ż¼OmniManip ┼cÖC(j©®)ąĄ▒█▒Š¾wĮŌ±ŅŻ¼─▄ē“┴Ń│╔▒Š▀węŲ⾄▓╗═¼ą╬æB(t©żi)Ą─▒Š¾wŻ©└²╚ńļp▒█⼈ą╬ÖC(j©®)Ų„⼈Ż®ĪŻ
OmniManip Š▀ėąÅŖ(qi©óng)⼤Ą─═©⽤Ę║╗»─▄⼒Ż¼▓╗╩▄╠žČ©ł÷(ch©Żng)Š░║═╬’¾wŽ▐ųŲĪŻłF(tu©ón)ĻĀ(du©¼)ęčīóŲõæ¬(y©®ng)⽤ė┌öĄ(sh©┤)ūų┘Y«a(ch©Żn)⾃äė(d©░ng)ś╦(bi©Īo)ūó / ║Ž│╔╣▄Ą└Ż¼īŹ(sh©¬)¼F(xi©żn)⼤ęÄ(gu©®)─ŻĄ─ÖC(j©®)Ų„⼈▄ē█E⾃äė(d©░ng)▓╔╝»ĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆ(xi©żn)Ž¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS(ch©Żng) Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°(sh©▒)^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |