| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
1)įOČ©╬╗ų├║═įOČ©ĮŪČ╚Ą─Öz£y
įOČ©╬╗ų├║═įOČ©ĮŪČ╚Ą─Öz£yų„ę¬ė├ė┌ÖCŲ„╚╦▀\äėĻP╣ØĄ─┴Ń╬╗║═śOŽ▐╬╗ų├Ą─Öz£yĪŻ┴Ń╬╗╩ŪÖCŲ„╚╦ĻP╣Ø▀\äėķ_╩╝ĢrĄ─╬╗ų├Ż¼┴Ń╬╗Öz£yŠ½Č╚ų▒Įėė░ĒæÖCŲ„╚╦▀\äėĄ─ £╩┤_Č╚ĪŻśOŽ▐╬╗ų├╩ŪųĖÖCŲ„╚╦ĻP╣Øäėū„ĘČć·Ą─Ųų╣³cŻ¼╦∙ęįśOŽ▐╬╗ų├Ą─Öz£yŲų° ▒ŻūoÖCŲ„╚╦║═░▓╚½äėū„Ą─ųžę¬ū„ė├ĪŻ
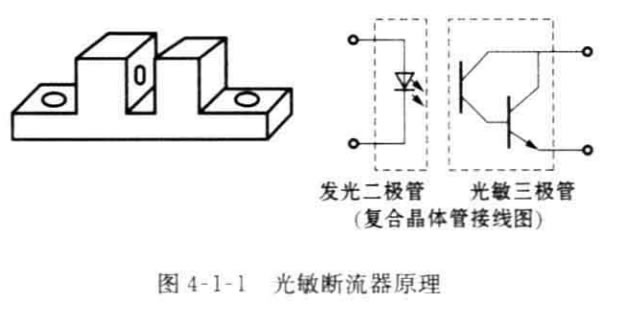
Z│Żė├Ą─╬╗ų├é„ĖąŲ„╩Ū╬óäėąą│╠ķ_ĻPŻ¼╦³ė╔╬óą═ķ_ĻPĪó▓┘ū„ÖCśŗ(ū▓Ņ^╗“═ŲŚU) ĮM│╔ĪŻ╦³░▓čbį┌äėū„ĘČć·ā╔Č╦Ą─śOŽ▐╬╗ų├╔ŽŻ¼«öčbį┌ÖCŲ„╚╦▀\äė▓┐╝■╔ŽĄ─ō§ēKęŲ äėĄĮ─│ę╗śOŽ▐╬╗ų├ĢrŻ¼ė|äė▓┘ū„ÖCśŗĄ─ū▓Ņ^╗“═ŲŚUŻ¼╩╣╬óą═ķ_ĻPĄ─ė|Ņ^ķ]║Ž╗“öÓ ķ_Ż¼╝┤┐╔½@Ą├╬╗ų├Ą─ļŖą┼╠¢ĪŻ╬óäėąą│╠ķ_ĻP╩Ūę╗ĘN╝╚║åå╬ėų┐╔┐┐Ą─Öz£yé„ĖąŲ„ĪŻ ę▓┐╔ęįė├ĘŪĮėė|ą═Ą─╣ŌļŖķ_ĻPū„╬╗ų├é„ĖąŲ„Ż¼Ųõ╣żū„įŁ└Ē┼c╬óäėąą│╠ķ_ĻPŽÓ═¼Ż¼ģ^ äe į┌ ė┌ ╦³ ╩Ū └¹ ė├ ╣Ō ├¶ öÓ ┴„ Ų„ üĒ ┤· ╠µ ╬ó ą═ ķ_ ĻP Ą─ ĪŻ ░č ░l ╣Ō Č■ śO ╣▄ ║═ ╣Ō ├¶ ╚² śO ╣▄ į┌ ŽÓī”ĘĮŽ“ųąķgĖ¶ķ_ę╗Č╬ŠÓļx░▓čbŻ¼«öčbėąō§ēKĄ─ÖCŲ„╚╦ ▀\äė▓┐╝■Å─ųąķg┤®▀^ĢrŻ¼░l╣Ō╣▄Ą─╣ŌŠĆ▒╗Ė¶öÓŻ¼Å─Č°╩╣ ╣Ō├¶╣▄Ėą╩▄ĄĮļŖą┼╠¢Ż¼╚ńłD4-1-1╦∙╩ŠĪŻ
│²┤╦ų«═Ō▀Ćėą║▄ČÓŲõ╦¹įŁ└ĒĄ─é„ĖąŲ„Ż¼└²╚ńļŖĖą ╩ĮĪóļŖ╚▌╩ĮĪó┤┼ļŖ╩ĮĪó╗¶Ā¢Ų„╝■Ą╚ę▓Č╝─▄īŹ¼FĘŪĮėė|Ą─ ĮėĮ³ķ_ĻPŻ¼Å─Č°śŗ│╔╬╗ų├é„ĖąŲ„ĪŻīŹļH╣żū„ųą┐╔ęįÅ─ ārĖ±│╔▒ŠĪó░▓čb│▀┤ńĪó£y┴┐Š½Č╚Īó╣żū„ŁhŠ│Śl╝■Ą╚Ė„ĘĮ ├µę“╦žüĒ▀Mąą▀xō±ĪŻ
2)╬╗ęŲ║═ĮŪČ╚Ą─£y┴┐
╬╗ęŲé„ĖąŲ„ę╗░ŃČ╝░▓čbį┌ÖCŲ„╚╦Ą─ĻP╣Ø╔ŽŻ¼ė├üĒÖz£yÖCŲ„╚╦Ė„ĻP╣ØĄ─╬╗ęŲ┴┐ĪŻū„×ķÖCŲ„╚╦Ą─╬╗ū╦ą┼ŽóŻ¼╦³Ęų×ķų▒ŠĆ╬╗ęŲ║═▐DĮŪ╬╗ęŲā╔ĘNŻ¼ ę╗░Ńų▒ŠĆęŲäėĻP╣Øė├ŠĆ╬╗ęŲé„ĖąŲ„Ż¼ą²▐DĻP ╣Ø▐DĮŪė├ĮŪ╬╗ęŲé„ĖąŲ„üĒ£y┴┐ĪŻŪ░š▀ėąų▒ŠĆļŖ╬╗ėŗ║═╚▌¢┼╩Į╬╗ęŲé„ĖąŲ„Ą╚Ż¼║¾š▀ ėąą²▐DļŖ╬╗ėŗĪóą²▐Dūāē║Ų„Īó╣ŌļŖŠÄ┤aŲ„Ą╚ĪŻ ę╗░ŃüĒšfŻ¼ĮŪ╬╗ęŲé„ĖąŲ„▒╚ŠĆ╬╗ęŲé„ ĖąŲ„Ą─¾wĘeąĪŻ¼░▓čbĘĮ▒ŃŻ¼╦∙ęįę▓┐╔ęį═©▀^ÖCąĄ▀\äė▐DōQÖCśŗīó╦∙ąĶ£y┴┐Ą─ų▒ŠĆ▀\ äė╬╗ęŲūā×ķą²▐D▀\äė╬╗ęŲ║¾Ż¼ė├ĮŪ╬╗ęŲé„ĖąŲ„▀Mąą£y┴┐ĪŻ
Å─£y┴┐Ą─ĘĮĘ©┐┤Ż¼ ę╗ĘN╩Ū─ŻöM╩ĮŻ¼╝┤īóę¬£yĄ─╬╗ęŲ┴┐ūāōQ│╔─ŻöM┴┐(ļŖ┴„ĪóļŖ ē║ĪóļŖūĶĄ╚)▀Mąą£y┴┐ĪŻ▀@ĘNÖz£y╦∙ė├į¬╝■Ą─│╔▒Š▌^Ą═Ż¼╩╣ė├Śl╝■▓╗ć└Ė±Ż¼Ž±ļŖ╬╗Ų„ Ą╚Ż╗┴Ēę╗ĘN╩ŪöĄūų╩ĮŻ¼╝┤īó╬╗ęŲ┴┐ūāōQ│╔├}ø_Ż¼├┐éĆ├}ø_┼cå╬╬╗╬╗ęŲŽÓī”æ¬Ż¼Öz£yį¬ ╝■▌ö│÷├}ø_öĄĄ─öĄūų┴┐ĪŻ▀@śėęū┼cėŗ╦ŃÖCŽÓ▀BĮėŻ¼┐╔┤µā”Īó▀\╦Ń║═┐žųŲŻ¼Ą½ųŲįņ░▓ čbĄ─Š½Č╚▌^Ė▀ĪŻ
ą²▐D▀\äė╩Ū│²ų▒ŠĆ▀\äėęį═ŌĄ─Zų„ꬥ─é„äėĘĮ╩ĮŻ¼ę“┤╦ė├ė┌£y┴┐ĮŪ╬╗ęŲĄ─é„Ėą Ų„į┌ęŲäėÖCŲ„╚╦īWųąę▓ėąZÅVĘ║Ą─æ¬ė├ĪŻĮėŽ┬üĒĮķĮBÄūĘNZ│Żė├Ą─ĮŪ╬╗ęŲé„ĖąŲ„ĪŻ
(1)╣ŌīWŠÄ┤aŲ„Ż║
╣ŌīWŠÄ┤aŲ„ęčĮø│╔×ķį┌ļŖÖC“īäėā╚▓┐Īó▌å▌SĪó╗“į┌▓┘┐vÖCśŗ╔Ž£y┴┐ĮŪ╦┘Č╚║═ĮŪ ╬╗ęŲĄ─ZŲš╝░Ą─čbų├ĪŻį┌ęŲäėÖCŲ„╚╦īWųąŻ¼ė├ŠÄ┤aŲ„£y┴┐╬╗ų├╗“▌åūėĄ─╦┘Č╚Ż¼╗“Ųõ ╦¹ļŖÖC“īäėĄ─ĻP╣ØĪŻę“×ķ▀@ą®é„ĖąŲ„╩Ū▒Š¾wĖą╩▄╩ĮĄ─Ż¼į┌ÖCŲ„╚╦ģó┐╝┐“╝▄ųąŻ¼╦³éā Ą─╬╗ų├╣└ėŗ╩ŪZ╝čĄ─Ż¼Č°į┌ė├ė┌ÖCŲ„╚╦Č©╬╗å¢Ņ}ĢrŻ¼ąĶę¬▌^┤¾Ą─ąŻš²ĪŻ
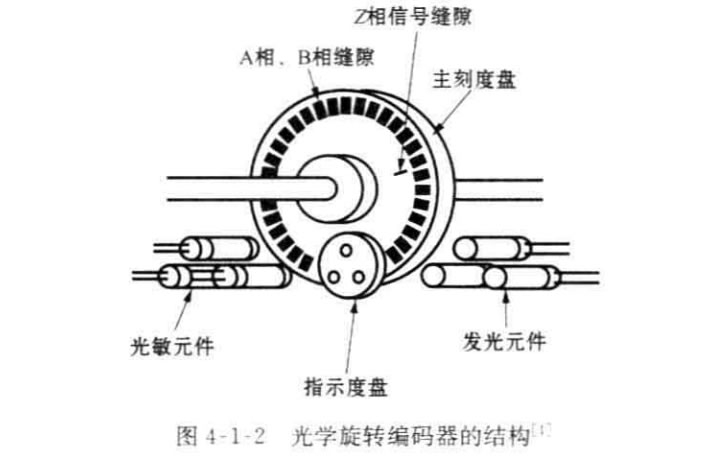
ęįłD4-1-2×ķ└²šf├„╣ŌīWŠÄ┤aŲ„Ą─ĮYśŗĪŻ╣ŌīWŠÄ┤aŲ„ė╔░l╣Ōį¬╝■ĪóŲ┴▒╬╣ŌĄ─╣╠ Č©╣Ō¢┼Īó┼c▐D▌Sę╗Ųą²▐DĄ─Ħ╣Ō¢┼Ą─▐D▒P║═╣╠Č©Ą─╣Ō├¶į¬╝■ĮM│╔ĪŻ░l╣Ōį¬╝■║═╣Ō├¶ į¬╝■░▓Ę┼į┌┤a▒PĄ─ā╔é╚Ż¼«ö▐D▒P▐DäėĢrŻ¼Ė∙ō■╣╠Č©Ą─║═▀\äėĄ─╣Ō¢┼Ą─┼┼┴ąŻ¼╣Ō├¶į¬╝■ Įė╩šĄ─╣Ō═©┴┐Ģ■░l╔·ūā╗»ĪŻ╣Ō├¶į¬╝■▌ö│÷Ą─▓©ą╬Įø▀^š¹ą╬║¾ą╬│╔├}ø_Ż¼Ė∙ō■├}ø_ėŗ öĄŻ¼┐╔ęįĄ├ĄĮ╣╠Č©į┌┤a▒P╔ŽĄ─▐D▌SĄ─ĮŪ╬╗ęŲĪŻį┌£y┴┐ųąŻ¼Z║¾Ą├ĄĮĄ─╣ŌÅŖą┼╠¢ė├ķō ųĄūāōQ│╔ļx╔óĄ─ĘĮ▓©Ż¼į┌┴┴║═░ĄĄ─ĀŅæBų«ķgū„▀xō±ĪŻĘų▒µ┬╩ęį├┐▐Dų▄Ų┌öĄ(CPR)Č╚┴┐ĪŻZąĪĄ─ĮŪĘų▒µ┬╩┐╔ęį╚▌ęūĄžÅ─ŠÄ┤aŲ„Ą─CPR Ņ~Č©ųĄėŗ╦Ń│÷ĪŻĄõą═Ą─ŠÄ┤a Ų„┐╔ōĒėą2000 CPR, Č°╣ŌīWŠÄ┤aŲ„╣żśI┐╔╚▌ęūĄžųŲįņ│÷Š▀ėą10000 CPR Ą─ ŠÄ ┤a Ų„ĪŻ«ö╚╗Ż¼Ė∙ō■╦∙ąĶĄ─ĦīÆŻ¼ZĻPµIĄ─╩ŪŠÄ┤aŲ„ąĶę¬ūŃē“┐ņŻ¼ęįėŗ╦ŃŲ┌═¹Ą─▌S▐D╦┘ĪŻ
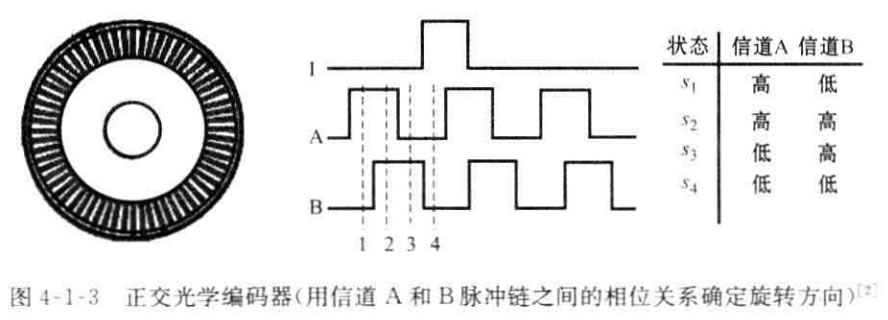
═©│Żį┌ąĶę¬Ęų▒µĮŪ╬╗ęŲ║═ĮŪ╦┘Č╚Ą─ĘĮŽ“Ą─Ģr║“Ż¼Ģ■╩╣ė├š²Į╗ŠÄ┤aŲ„ĪŻį┌▀@ĘN ŪķørŽ┬ėąā╔ī”šš├„į┤║═Öz£yŲ„Ż¼Ą┌Č■ī”Ą─šš├„į┤║═Öz£yŲ„░▓čbį┌ŠÓļxDę╗ī”1/4 ┐╠Č╚ų▄Ų┌Ą─ĄžĘĮŻ¼╚ńłD4-1-3╦∙╩ŠĪŻā╔ĮM╣ŌÅŖą┼╠¢║Ž│╔Ą─ę╗ī”ĘĮ▓©Ż¼╠ß╣®┴╦Ė³ČÓĄ─ ą┼ŽóĪŻ░┤šš──éĆĘĮ▓©į┌ŽÓ╬╗╔ŽĖ³│¼Ū░Ż¼Š═┐╔ęį┤_Č©▐DäėĘĮŽ“ĪŻČ°ŪęŻ¼╦─éĆ┐╔Öz£yĄ─ ▓╗═¼ĀŅæBŻ¼į┌▓╗Ė─ūā▐D▒P┐╠Č╚Ą─ŪķørŽ┬Ż¼Ęų▒µ┬╩┐╔╠ßĖ▀4▒ČĪŻę“┤╦Ż¼ ę╗éĆ2000CPR š²Į╗ŠÄ┤aŲ„─▄«a╔·8000éĆėŗöĄĪŻ
(2)┤┼╩ĮŠÄ┤aŲ„Ż║
╣ŌīWŠÄ┤aŲ„Š½Č╚▌^Ė▀Ż¼╣ż╦ćÅ═ļsŻ¼│╔▒Šę▓▒╚▌^Ė▀ĪŻū„×ķęŲäė▌åĮŪČ╚Ą─£y┴┐═©│Ż ▓ó▓╗ąĶę¬▀@├┤Ė▀Ą─Š½Č╚Ż¼┤┼╩ĮŠÄ┤aŲ„Š═╩Ūę╗ĘN║åå╬▒Ńę╦Ą─ĮŪ╬╗ęŲé„ĖąŲ„ĪŻ
┤┼╩Įé„ĖąŲ„╩Ū└¹ė├╗¶Ā¢ą¦æ¬Ą─įŁ└ĒųŲ│╔Ą─ĪŻ╗¶Ā¢ą¦æ¬╩ŪųĖį┌ę╗éĆ░ļī¦¾w▒ĪŲ¼ ╔Žėąę╗ļŖ┴„═©▀^Ż¼┤╦Ģr╚ńėąę╗┤┼ł÷ę▓ū„ė├ė┌įō░ļī¦¾w▓─┴Ž╔ŽŻ¼ätį┌┤╣ų▒ė┌ļŖ┴„ĘĮŽ“Ą─░ļī¦¾wā╔Č╦Ż¼Ģ■«a╔·ę╗éĆ║▄ąĪĄ─ļŖē║Ż¼įōļŖē║Š═ĘQ×ķ╗¶Ā¢ļŖē║ĪŻ«ö┤┼ąį▓─┴ŽųŲ│╔ Ą─▐Dūėą²▐DĢrŻ¼Š═Ģ■ėąę╗éĆūā╗»Ą─┤┼ł÷ū„ė├ė┌╗¶Ā¢į¬╝■(░ļī¦¾w▓─┴Ž)╔ŽŻ¼╩╣╗¶Ā¢ļŖ ē║«a╔·├}ø_ą┼╠¢ĪŻī”╦∙«a╔·Ą─├}ø_öĄ─┐ėŗöĄ╝┤┐╔Öz£yĮŪ╬╗ęŲŻ¼ŲõįŁ└Ē║═╣ŌīWŠÄ┤a Ų„╩ŪŅÉ╦ŲĄ─ĪŻ
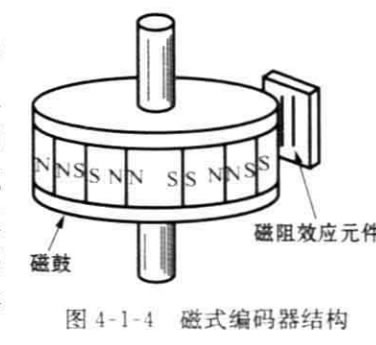
┤┼╩ĮŠÄ┤aŲ„╩Ū═©▀^į┌ÅŖ┤┼ąį▓─┴Ž▒Ē├µ╔ŽĄ╚ ķgĖ¶Ą─┤┼╗»┐╠Č╚ś╦│▀Ż¼ś╦│▀┼į▀ģŽÓī”Ę┼ų├┤┼ūĶ ą¦æ¬į¬╝■╗“╗¶Ā¢į¬╝■Ż¼╝┤─▄Öz£y┤┼═©Ą─ūā╗»Ż¼╚ń łD4-1-4╦∙╩ŠŻ¼ā╔éĆ┤┼é„ĖąŲ„Ą─ŠÓļxŪĪ║├╩Ū┤┼╗» ś╦│▀ķgĖ¶Ą─1/4. ę“┤╦┐╔ęįĖ∙ō■▌ö│÷ą┼╠¢Ą─ŽÓ╬╗ ĻPŽĄÖz£yą²▐DĘĮŽ“ĪŻ┼c╣ŌīWŠÄ┤aŲ„ŽÓ▒╚Ż¼┤┼╩ĮŠÄ ┤aŲ„Ą─┐╠Č╚ķgĖ¶┤¾Ż¼Ą½╦³Š▀ėą─═ė═╬█Īó┐╣ø_ō¶Ą╚ ╠ž³cĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |