| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
Ų∙Į±×ķų╣Ż¼▌åūėę╗░Ń╩ŪęŲäėÖCŲ„╚╦īW║═╚╦įņ▄ć▌vųąZ┴„ąąĄ─▀\äėÖCśŗĪŻ╦³┐╔▀_ ĄĮ║▄Ė▀Ą─ą¦┬╩Ż¼╚ńłD2.3╦∙╩ŠŻ¼Č°Ūęė├▒╚▌^║åå╬Ą─ÖCąĄŠ═┐╔īŹ¼F╦³Ą─ųŲū„ĪŻ ┴Ē═ŌŻ¼į┌▌å╩ĮÖCŲ„╚╦įOėŗųąŻ¼ŲĮ║Ō═©│Ż▓╗╩Ūę╗éĆ蹊┐å¢Ņ}ĪŻę“×ķį┌╦∙ėąĢrķg└’Ż¼ ▌å╩ĮÖCŲ„╚╦ę╗░ŃČ╝▒╗įOėŗ│╔╦∙ėą▌åūėŠ∙┼cĄžĮėė|ĪŻę“Č°Ż¼3éĆ▌åūėŠ═ūŃęį▒ŻūCĘĆČ© ŲĮ║ŌĪŻļm╚╗╬ęéāīóį┌Ž┬├µ┐┤ĄĮŻ¼ā╔▌åÖCŲ„╚╦ę▓┐╔ęįĘĆČ©ĪŻ╚ń╣¹╩╣ė├Ą─▌åūėČÓė┌3éĆŻ¼ «öÖCŲ„╚╦┼÷ĄĮŲķŹń▓╗ŲĮĄ─Ąžą╬ĢrŻ¼Š═ąĶę¬ę╗éĆæęÆņŽĄĮyęį╚▌įS╦∙ėą▌åūėČ╝▒Ż│ų┼cĄž Įė ė| ĪŻ
▌å╩ĮÖCŲ„╚╦蹊┐▓╗╩Ūænæ]ŲĮ║ŌŻ¼Č°╩ŪāAŽ“ė┌░čųž³cĘ┼į┌Ā┐ę²ĪóĘĆČ©ąįĪóÖCäėąį╝░ ┐žųŲå¢Ņ}Ż║×ķĖ▓╔w╦∙ėąŲ┌═¹Ą─Ąžą╬Ż¼ÖCŲ„╚╦Ą─▌åūė─▄ʱ╠ß╣®ūŃē“Ą─Ā┐ę²┴”║═ĘĆČ©ąį? ÖCŲ„╚╦Ą─▌åūėĮYśŗ─▄ī”ÖCŲ„╚╦Ą─╦┘Č╚▀Mąą│õĘų┐žųŲåß?
«ö╬ęéā┐╝æ]ęŲäėÖCŲ„╚╦▀\äėĄ─┐╔─▄╝╝ągĢrŻ¼┐╔─▄Ą─▌åūėĮYśŗėą ║▄┤¾Ą─┐šķgĪŻę“×ķėą║▄ČÓöĄ─┐▓╗═¼Ą─▌åūėŅÉą═Ż¼Ė„ėąŲõ╠žČ©Ą─ā׳c║═╚▒³cŻ¼╣╩╬ęéāÅ─ įö╝Üėæšō▌åūėķ_╩╝Ż¼╚╗║¾üĒÖz“××ķęŲäėÖCŲ„╚╦é„╦═╠žČ©▀\äėą╬╩ĮĄ─═Ļš¹Ą─▌åūėśŗįņĪŻ
ėą╦─ĘNų„ꬥ─▌åūėŅÉą═Ż¼╚ńłD2.25╦∙╩ŠĪŻį┌▀\äėīWĘĮ├µŻ¼╦³éā▓Ņäe║▄┤¾ĪŻę“┤╦ ▌åūėŅÉą═Ą─▀xō±ī”ęŲäėÖCŲ„╚╦Ą─š¹éĆ▀\äėīWėą║▄┤¾Ą─ė░ĒæĪŻś╦£╩▌å║═ąĪ─_▌åėąę╗éĆ ą²▐Dų„▌SŻ¼ę“Č°╩ŪĖ▀Č╚ėąŽ“Ą─ĪŻį┌▓╗═¼Ą─ĘĮŽ“▀\äėŻ¼ąĶꬎ╚čžų°┤╣ų▒▌S▓┘┐v▌åūėĪŻ ▀@ā╔ĘN▌åĄ─ų„ę¬▓Ņäeį┌ė┌ś╦£╩▌å┐╔ęį═Ļ│╔▓┘┐vČ°¤oĖ▒ū„ė├Ż¼ę“×ķą²▐Dųąą─Įø▀^Įėė| Ų¼ų°ĄžŻ╗Č°ąĪ─_▌å└@Ų½ą─▌Są²▐DŻ¼į┌▓┘┐vŲ┌ķgĢ■ę²Ųę╗éĆ┴”Ż¼╝ėĄĮÖCŲ„╚╦Ą─Ąū▒PĪŻ
╚Ąõ▌å║═Ū“ą╬▌åČ■š▀Ą─įOėŗ▒╚é„ĮyĄ─ś╦£╩▌å╩▄ĘĮŽ“ąįĄ─╝s╩°╔┘ę╗ą®ĪŻ╚Ąõ▌åĄ─ ╣”─▄┼cś╦£╩▌åę╗śėŻ¼Ą½╦³į┌┴Ēę╗ĘĮŽ“«a╔·Ą═Ą─ūĶ┴”Ż¼╦³ėąĢr┤╣ų▒ė┌│ŻęÄĘĮŽ“Ż¼╚ń╚Ąõ 90ĪŃ▌åŻ╗ėąĢrį┌ųąķgĮŪČ╚Ż¼╚ń╚Ąõ45ĪŃ▌åĪŻčbį┌▌åūėų▄ć·Ą─▌üūė╩Ū¤oį┤Ą─Ż¼▌åĄ─ų„▌Sė├ ū„Wę╗ų„äėĄž«a╔·äė┴”Ą─▀BĮėĪŻ▀@éĆįOėŗĄ─ų„ę¬ā׳cį┌ė┌Ż║ļm╚╗āHčžų„▌SĮo▌åūėą²▐D╠ß╣®äė┴”(═©▀^▌å▌S),▌åūėęį║▄ąĪĄ──”▓┴Ż¼┐╔ęįčžįSČÓ┐╔─▄Ą─▄ē█E░┤▀\äėīWįŁ└ĒęŲ äėŻ¼Č°▓╗āHāH╩ŪŽ“Ū░╗“š▀Ž“║¾ĪŻ
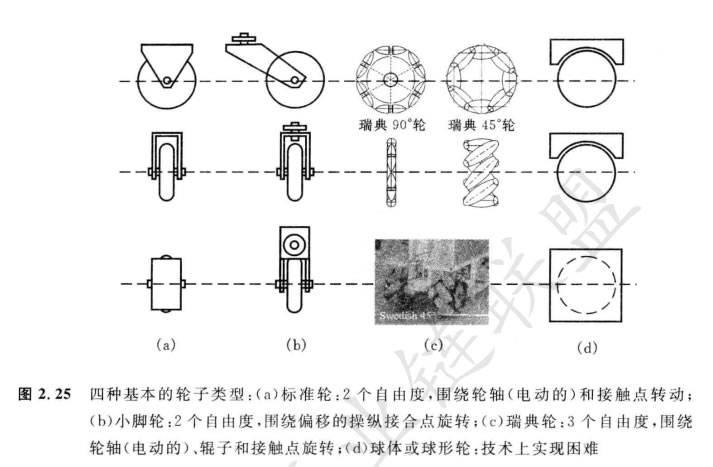
Ū“ą╬▌å╩Ūę╗ĘNšµš²Ą─╚½Ž“▌åŻ¼Įø│Ż▒╗įOėŗ│╔┐╔ęįčž╚╬║╬ĘĮŽ“ų„äėĄž╩▄äė┴”Č°ą² ▐DĪŻīŹ¼F▀@ĘNŪ“ą╬śŗįņĄ─ę╗ĘNÖCśŗ─ŻĘ┬┴╦ėŗ╦ŃÖC╩¾ś╦Ż¼éõėąų„äė╠ß╣®äė┴”Ą─▌üūėŻ¼▀@ ą®▌üūė░▓ų├į┌Ū“Ą─D▓┐▒Ē├µŻ¼▓óĮoėĶą²▐DĄ─┴”ĪŻ
¤ošōė├╩▓├┤▌åŻ¼į┌×ķ╦∙ėąĄžą╬ŁhŠ│įOėŗĄ─ÖCŲ„╚╦║═Š▀ėą3éĆęį╔Ž▌åūėĄ─ÖCŲ„╚╦ ųąŻ¼š²│ŻŪķørŽ┬ąĶę¬ę╗éĆæęÆņŽĄĮyęį▒Ż│ų▌åūė┼cĄž├µĄ─Įėė|ĪŻ ę╗ĘNZ║åå╬Ą─æęÆņĘĮ Ę©╩Ū▌åūė▒Š╔ĒįOėŗ│╔╚ßąįĄ─ĪŻ└²╚ńŻ¼į┌─│ą®╩╣ė├ąĪ─_▌åĄ─╦─▌å╩ęā╚ÖCŲ„╚╦ŪķørŽ┬Ż¼ųŲ įņÅS╝ęęčĮø░č▄øŽ─zĄ─┐╔ūāą╬▌å╠źė├į┌▌å╔ŽŻ¼ųŲū„ę╗éĆų„æęÆņ¾wĪŻ«ö╚╗Ż¼▀@ĘNėąŽ▐Ą─ ĮŌøQĘĮ░Ė▓╗─▄┼cæ¬ė├ųąÕeŠCÅ═ļsĄ─æęÆņŽĄĮyŽÓ▒╚öMĪŻį┌æ¬ė├ųąŻ¼ī”├„’@Ą─ĘŪŲĮ╠╣Ąž ą╬Ż¼ÖCŲ„╚╦ąĶę¬Ė³äėæBĄ─æęÆņŽĄĮyĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |