| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ęŲäėÖCŲ„╚╦▌åūėŅÉą═Ą─▀xō±┼c▌åūėčb┼õ╗“▌åūėÄū║╬╠žš„Ą─▀xō±Šo├▄ŽÓĻPĪŻęŲäėÖCŲ„╚╦Ą─įOėŗš▀į┌įOėŗ▌å╩ĮÖCŲ„╚╦Ą─▀\äėÖCśŗĢrŻ¼ąĶę¬═¼Ģr┐╝æ]▀@ā╔éĆå¢Ņ}ĪŻ×ķ║╬▌åūėĄ─ŅÉą═║═▌åūėĄ─Äū║╬╠žš„╚ń┤╦ųžę¬?ę“×ķÖCŲ„╚╦Ą─╚²éĆ╗∙▒Š╠žš„╩▄▀@ą®▀xō±╦∙ų¦┼õŻ║ÖCäėąįĪó┐╔┐žąį║═ĘĆČ©ąįĪŻ
Ų¹▄ć┤¾Č╝×ķĖ▀Č╚ś╦£╩╗»Ą─ŁhŠ│(Ą└┬ĘŠW)Č°įOėŗŻ¼┼cŲõ▓╗═¼Ą─╩ŪŻ¼ęŲäėÖCŲ„╚╦ät╩Ū ×ķæ¬ė├į┌ĘNŅÉĘ▒ČÓĄ─ŁhŠ│Č°įOėŗĪŻŲ¹▄ć╚½▓┐╣▓ŽĒŽÓ═¼Ą─▌åūėĮYśŗŻ¼ę“×ķį┌įOėŗ┐šķg ųą┤µį┌ę╗éĆģ^ė“Ż¼╩╣Ą├╦³éāī”ś╦£╩╗»ŁhŠ│(õü║├Ą─╣½┬Ę)Ą─ÖCäėąįĪó┐╔┐žąį║═ĘĆČ©ąįZ┤¾ĪŻ┐╔╩ŪŻ¼▓╗═¼Ą─ęŲäėÖCŲ„╚╦├µ┼RĖ„ĘN▓╗═¼ŁhŠ│Ż¼ø]ėąå╬dę╗éĆ▌åūėĮYśŗ┐╔ęį╩╣▀@ą® ŲĘ┘|Z┤¾╗»ĪŻ╦∙ęįŻ¼─ŃĢ■┐┤ĄĮęŲäėÖCŲ„╚╦Ą─▌åūėĮYśŗĘNŅÉĘ▒ČÓĪŻīŹļH╔ŽŻ¼│²┴╦×ķĄ└┬Ę ŽĄĮyįOėŗĄ─ęŲäėÖCŲ„╚╦═ŌŻ¼║▄╔┘ÖCŲ„╚╦╩╣ė├Ų¹▄ćĄ─Ackerman ▌åūėĮYśŗŻ¼ę“×ķ╦³Ą─ÖC äėąį▌^▓ŅĪŻ
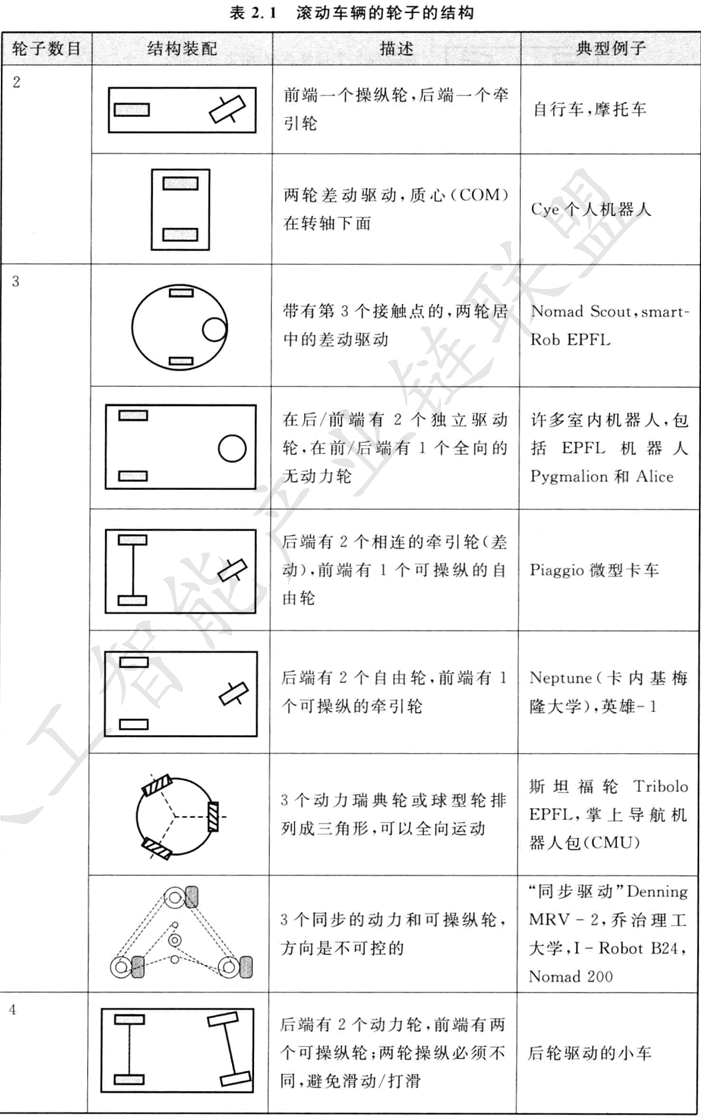
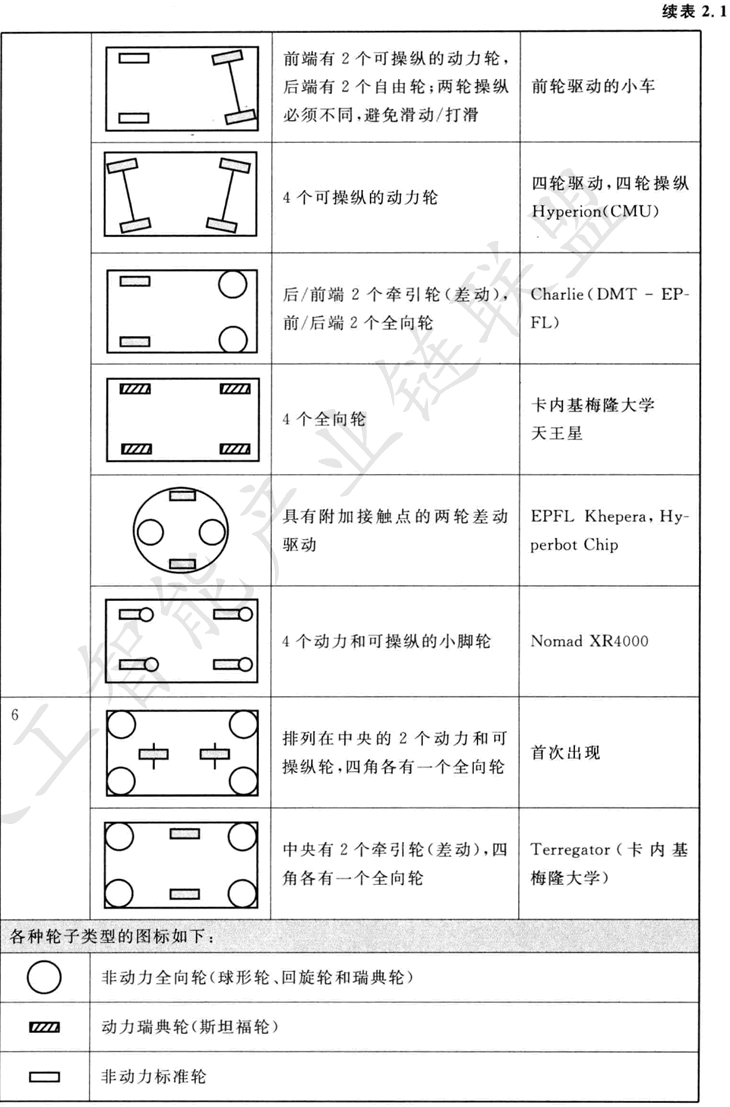
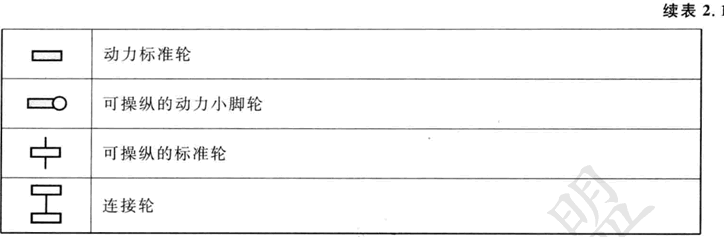
▒Ē2.1Įo│÷┴╦▌åūėĮYśŗĄ─Ė┼├▓Ż¼░┤▌åūėöĄ─┐┼┼ą“ĪŻ▒Ēųą├Ķ╩÷┴╦╠ž╩Ō▌åūėŅÉą═Ą─▀xō±║═ÖCŲ„╚╦Ąū▒P╔Ž╦³éāĄ─Äū║╬ĮYśŗ▀@ā╔éĆĘĮ├µĪŻ╬ęéāūóęŌĄĮŻ¼╦∙╩ŠĄ──│ą®▌åūėĮYśŗį┌ęŲäėÖCŲ„╚╦Ą─æ¬ė├ųą║▄╔┘ė├ĄĮĪŻ└²╚ńŻ¼ā╔▌åūįąą▄ćčb┼õŻ¼ŲõÖCäėąįųąĄ╚Ż¼┐╔┐žąį ▓ŅĪŻį┘Ž±å╬═╚╠°▄SÖCŻ¼╦³Ė∙▒Š▓╗─▄ņoų╣ĄžšŠų°ĪŻ▓╗▀^Ż¼▒Ēųą╠ß╣®┴╦į┌▀\äėÖCŲ„╚╦įOėŗ ųą┐╔─▄ė├ĄĮĄ─įSČÓĘNŅÉ▌åūėĮYśŗĄ─šf├„ĪŻ
▒Ē2.1ųąĘNŅÉĄ─öĄ─┐╩Ū║▄ČÓĄ─ĪŻ▓╗▀^Ż¼▀@└’┴ą│÷┴╦ųžę¬Ą─┌ģŽ“║═ĘųĮMŻ¼╦³┐╔Ä═ų· └ĒĮŌĖ„ĮYśŗĄ─ā׳c║═╚▒³cĪŻŽ┬├µŻ¼Ė∙ō■ęįŪ░┤_šJĄ─╚²éĆå¢Ņ}Ż║ĘĆČ©ąįĪóÖCäėąį║═┐╔┐žąįŻ¼╬ęéāüĒ┤_šJę╗Ž┬─│ą®ĻPµIąįĄ─š█ųįĪŻ
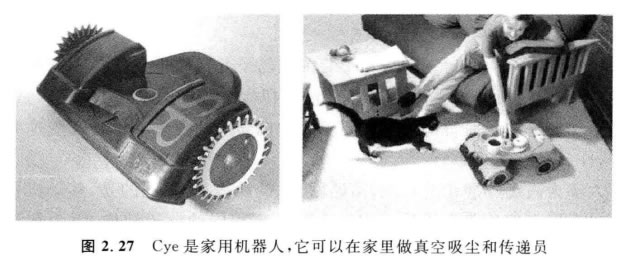
┴Ņ╚╦¾@ŲµĄ─╩ŪŻ¼ņoæBĘĆČ©╦∙ę¬Ū¾Ą─ZąĪ▌åūėöĄ─┐╩Ū2éĆĪŻ╚ń╔Ž╦∙╩÷Ż¼╚ń╣¹┘|ą─į┌▌å▌SŽ┬├µŻ¼ ę╗éĆā╔▌å▓Ņäė“īäėĄ─ÖCŲ„╚╦┐╔ęįīŹ¼FņoæBĘĆČ©ĪŻ Cye Š═╩Ū╩╣ė├▀@ĘN▌åūė ĮYśŗĄ─╔╠śIęŲäėÖCŲ„╚╦(łD2.27)ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |