| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ų▒┴„ļŖÖC┐žųŲŲ„┐╔▓╔ė├ļŖÖC┐žųŲīŻė├DSP(╚ńTI ╣½╦ŠĄ─TMS320C24X ŽĄ┴ąĪó AD ╣½╦ŠĄ─ADMCxx ŽĄ┴ą),ę▓┐╔▓╔ė├å╬Ų¼ÖC+ų▒┴„ļŖÖC┐žųŲīŻė├╝»│╔ļŖ┬ĘĄ─ĘĮ ░Ė(╚ń─”═ą┴_└Ł╣½╦ŠĄ─Ą┌Č■┤·¤o╦óų▒┴„ļŖÖC┐žųŲīŻė├╝»│╔ļŖ┬ĘMC33035) ĪŻ Ū░ š▀ ╝»│╔Č╚Ė▀Ż¼ļŖ┬ĘįOėŗ║åå╬Ż¼▀\╦Ń╦┘Č╚┐ņŻ¼┐╔īŹ¼FÅ═ļsĄ─╦┘Č╚┐žųŲ╦ŃĘ©Ż¼Ą½ė╔ė┌DSP Ą─ārĖ±Ė▀Č°▓╗▀m║Žė┌ąĪ╣”┬╩Ą═│╔▒ŠĄ─ų▒┴„ļŖÖC┐žųŲŲ„ĪŻ║¾š▀ļm╚╗▀\╦Ń╦┘Č╚Ą═Ż¼Ą½ ų╗ę¬▓╔ė├▀m«öĄ─╦┘Č╚┐žųŲ╦ŃĘ©Ż¼ę└╚╗┐╔ęį▀_ĄĮ▌^Ė▀Ą─┐žųŲŠ½Č╚Ż¼▀m║Žė┌ąĪ╣”┬╩Ą═│╔ ▒ŠĄ─ų▒┴„ļŖÖC┐žųŲŲ„ĪŻ ▒Š╣ØęįTMS320F2812 ×ķ└²Ż¼šf├„¤o╦óų▒┴„ļŖÖC┐žųŲŲ„Ą─ĮM│╔╝░įOėŗįŁ└ĒĪŻ
TMS320F2812 ╩Ū TI ╣½╦Šķ_░lĄ─Š▀ėąÅŖ┤¾Ą─┐žųŲ║═ą┼╠¢╠Ä└Ē─▄┴”Ą─32╬╗Č© ³c DSP ąŠŲ¼ĪŻ╦³┐╔╠ß╣®150 MIPS Ą─ėŗ╦Ńąį─▄Ż¼ėą8JĦėą┴„╦«ŠĆ┤µā”įLå¢Ą─┴„ ╦«ŠĆ▒ŻūoÖCųŲęį╝░▓╔ė├╠ßĖ▀╠Ä└Ē╦┘Č╚Ą─┴„╦«ŠĆ╝╝ągĪŻįōŲ„╝■ėąŲ¼ā╚SRAM ║═ RAM ┤µā”Ų„Ż¼3éĆd┴óĄ─32╬╗CPU Č©ĢrŲ„Ż¼2┬ĘSCI Įė┐┌Ż¼1┬ĘSPI Įė┐┌Ż¼56éĆd ┴óĄ─ŠÄ│╠Ą─GPIO ę²─_ĪŻ╦³š¹║Ž┴╦╩┬╝■╣▄└ĒŲ„ĪóFlash ┤µā”Ų„ĪóA/D ▐DōQ─ŻēKĪó CAN ─ŻēKĪóš²Į╗ŠÄ┤aļŖ┬Ęęį╝░ČÓ═©Ą└ŠÅø_┤«┐┌Ą╚═ŌįOĪŻ╩┬╝■╣▄└ĒŲ„╩ŪīŹ¼FöĄūųļŖ ÖC┐žųŲĄ─ųžę¬Ą──ŻēKŻ¼┐╔ī”ļŖÖCīŹąąČÓ╣”─▄┐žųŲĪŻ├┐éĆ╩┬╝■╣▄└Ē─ŻēK░³└©Č©ĢrŲ„Īó ▒╚▌^Ų„Īó▓ČūĮå╬į¬ĪóPWM ▀ē▌ŗļŖ┬ĘĄ╚ĪŻ╩┬╝■╣▄└ĒŲ„ EVA ĪóEVBĖ„ėą2éĆČ©ĢrŲ„Ż¼ Č©ĢrŲ„ėą«a╔·PWM ▓©ą╬Ż¼ŠÄ│╠ā╚▓┐╗“═Ō▓┐Ą─▌ö╚ļĢrńŖ║═×ķ▒╚▌^Ų„ĪóPWM ļŖ┬Ę╠ß ╣®╗∙£╩ĢrńŖĄ─ū„ė├ĪŻEVA,EVB Ė„ėą3éĆ▒╚▌^å╬į¬Ż¼╦³éāų„ę¬┐žųŲDSP Ą─ PWM ▌ö│÷Ą─š╝┐š▒╚ĪŻPWM ļŖ┬Ę┐╔ęį▌ö│÷12┬ĘPWM ĪŻ╩┬╝■╣▄└ĒŲ„╣▓ėą3éĆ▓Č½@å╬ į¬Ż¼╦³éāė├üĒ┤_Č©ļŖÖC▐DūėĄ─▐D╦┘ĪŻ├┐éĆ╩┬╝■╣▄└ĒŲ„Č╝ėąę╗éĆš²Į╗ŠÄ┤a├}ø_ļŖ┬ĘŻ¼ ┐╔ęįė├╦³éā╦Ń│÷ļŖÖC▐DūėĄ─╦┘Č╚║═ĘĮŽ“ą┼ŽóĪŻ
TMS320F2812 ▓╔ ė├C/C++ ŠÄ│╠Ż¼╦³Ą─C ŠÄūgŲ„╣”─▄²R╚½Ż¼┐╔ęį└¹ė├įōŠÄūg Ų„īóś╦£╩Ą─ANSI C/C++│╠ą“▐DōQ│╔DSP Ą─ģRŠÄ┤·┤aĪŻī”ė┌ę¬Ū¾Ė▀Ģr║═Ė▀Š½Č╚ Ą─ŽĄĮyŻ¼╩╣ė├ę╗ą®║»öĄÄņīŹ¼F£╩┤_Ą─ĖĪ³c▀\╦ŃŻ¼▀@śė▒╚ų▒Įė▓╔ė├ANSIC ŠÄīæ│╠ą“ ╦┘Č╚╔Žėą├„’@Ą─╠ßĖ▀Ż¼┐╔½@Ą├Ė³║├Š½Č╚ĪŻ
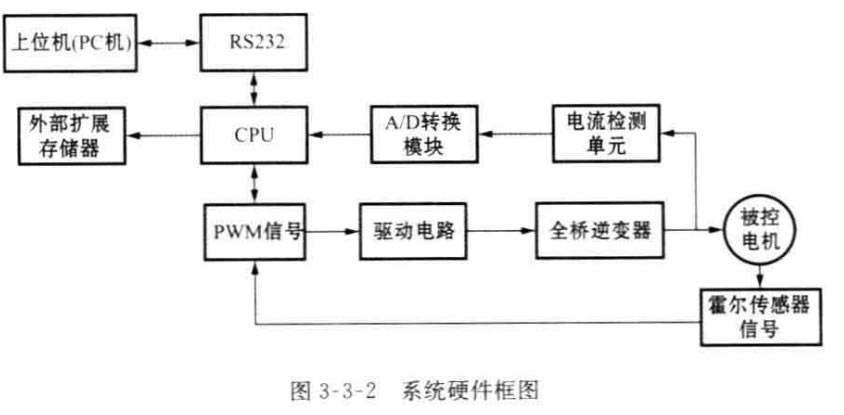
ŽĄĮyĄ─ė▓╝■┐“łD╚ńłD3-3-2╦∙╩ŠŻ¼┐╔ęį┐┤│÷╗∙▒Š╔Ž░³└©ę╗éĆęįTMS320F2812DSP ×ķ║╦ą─Ą─DSP ┐žųŲ░ÕŻ¼ę╗ēK┼õ╠ūĄ─╣”┬╩“īäė░Õ║═ę╗┼_¤o╦óų▒┴„ļŖÖCĪŻīŹ¼FĄ─ ų„ę¬╣”─▄╩Ū┐žųŲųĖ┴ŅĄ─Įė╩š║═ł╠ąąŻ¼╦┘Č╚ą┼╠¢Ą─Įė╩š║═ėŗ╦Ń╠Ä└ĒŻ¼ļŖ┴„▓╔śėą┼╠¢Įė ╩š║═▐DōQŻ¼╦┘Č╚ķ]Łh║═ļŖ┴„ķ]Łh┐žųŲ╦ŃĘ©Ą─ł╠ąąĄ╚ĪŻ
ī”ļŖÖCĄ─┐žųŲų„ę¬╩╣ė├F2812 Ų¼╔ŽĄ─ā╔éĆļŖÖC┐žųŲīŻė├═ŌįOĪ¬EVA ║═ EVB ĪŻ└¹ė├═©ė├Č©ĢrŲ„ T1 ┼õ ║ŽPWM ░l╔·Ų„üĒ«a╔·“īäė╣”┬╩Ų„╝■╦∙ąĶĄ─┴∙┬Ę PWM ą┼╠¢Ż¼═©▀^GPIO Įė┐┌īó╚²┬ĘļŖÖC╗¶Ā¢é„ĖąŲ„ą┼╠¢▌ö╚ļ▓Č½@å╬į¬Ż¼Å─Č°½@╚Ī╚²éĆ▐DūėĄ─╬╗ų├Ż¼▀MČ°┐žųŲļŖÖCĄ─ōQŽÓ║═▀MąąļŖÖC▐D╦┘Ą─ėŗ╦ŃĪŻā╔éĆ12╬╗AD ─Ż ēKī”ŽÓļŖ┴„ą┼╠¢Iphase ║═▌ö╚╦Ą─╦┘Č╚š{╣ØļŖē║ą┼╠¢Vref▀Mąą▐DōQ║═┤µā”Ż¼Ęųäeū„ ×ķļŖ┴„ŁhĄ─Ę┤üą┼╠¢║═╦┘Č╚ŁhĄ─ģó┐╝ą┼╠¢ĪŻ═©▀^Ų¼╔ŽĄ─═©ė├▌ö╚ļ▌ö│÷Įė┐┌ (GPIO), īŹ¼F┼c╣”┬╩“īäė▓┐ĘųĄ─▀BĮėŻ¼▌ö│÷Ųäė═Żų╣ą┼╠¢Īóš²Ę┤▐Dą┼╠¢ĪóŠo╝▒ųŲäė ą┼╠¢Ą╚Ż¼═¼ĢrĮė╩š▌ö╚ļĄ─▒Żūoą┼╠¢Īó╣╩šŽą┼╠¢Ą╚ĪŻ═©▀^Ų¼╔ŽĄ─SCI ─ŻēKīŹ¼F┼cėŗ╦Ń ÖCĄ─═©ą┼ Ż¼ Įė╩š╔Ž╬╗ÖCĄ─┐žųŲųĖ┴Ņ ĪŻ
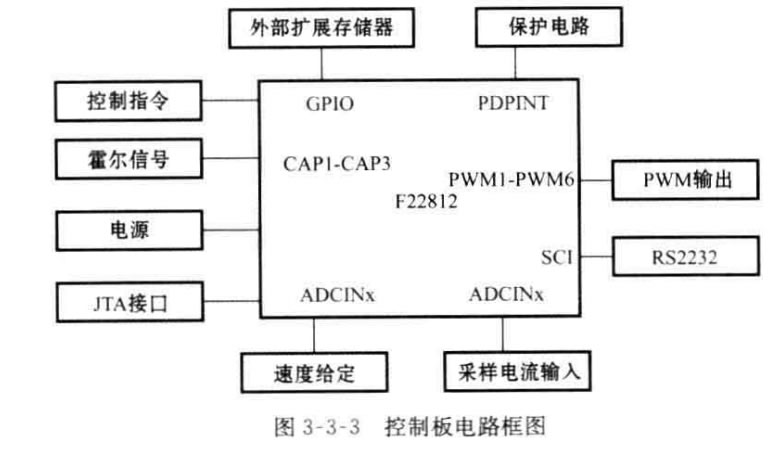
┐žųŲ▓┐Ęųė▓╝■ĮYśŗ╚ńłD3-3-3╦∙╩ŠĪŻ
╣”┬╩“īäė▓┐ĘųĄ─ė▓╝■ļŖ┬ĘŻ¼ų„ę¬ė╔Ū░ų├“īäėąŠŲ¼║═┴∙éĆ╣”┬╩MOSEFET ╣▄ĮM│╔Ż¼īŹ¼Fī”┐žųŲ▓┐Ęųé„╦═▀^üĒĄ─ōQŽÓą┼ŽóĄ─╠Ä└Ē║═ PWM ą┼╠¢Ą─Ė¶ļxĘ┼┤¾Ż¼┐žųŲ╣” ┬╩ MOSFET ╣▄Ą─ī¦═©║═ĻPöÓŻ¼ęį┤╦üĒ┐žųŲļŖÖCĄ─╣żū„ĀŅæB║═╦┘Č╚ĪŻ│²┤╦ų«═ŌŻ¼▀Ć ėąļŖį┤ļŖ┬Ę Ż¼ ļŖ┴„Öz£yļŖ┬Ę Ż¼ ▀^┴„▒Żūo║═Šo╝▒ųŲäėļŖ┬ĘĄ╚▌oų·ļŖ┬Ę Ż¼ ęį╝░┼cļŖÖC║═ ┐ž ųŲ ░Õ Ą─ Įė ┐┌ ļŖ ┬Ę ĪŻ
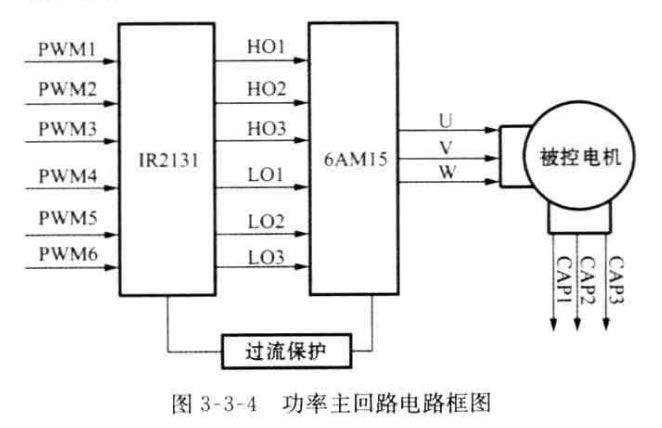
Ū░ų├“īäėąŠŲ¼▓╔ė├Ą─╩ŪIR ╣½╦ŠĄ─MOSFET “īäėąŠŲ¼ IR2131,Š▀ėą╝»│╔Č╚ Ė▀Īó┐╔┐┐ąį║├Īó╦┘Č╚┐ņĪó▀^┴„ŪĘē║▒ŻūoĪóš{įćĘĮ▒ŃĄ╚╠ž³cĪŻ IR2131 ā╚ ▓┐ įO ėŗ ėą ▀^ ┴„ Īó ▀^ē║╝░ŪĘē║▒ŻūoĪŻ
╣”┬╩“īäėļŖ┬Ę▓╔ė├24V ╣®ļŖŻ¼“īäėļŖ┬Ę┼cļŖÖCĄ─▀BĮė▓╔ė├╚²ŽÓ╚½ś“ĘĮ╩ĮŻ¼ļŖ ÖC╣żū„į┌╚²ŽÓ┴∙ĀŅæB─Ż╩ĮŽ┬ĪŻęį╚╬ ę╗ Ģr┐╠ļŖÖCų╗ėąā╔ŽÓī¦═©Ą─ĘĮ╩ĮüĒ┐žųŲōQ┴„į¬ ╝■ ĪŻPWM š{ųŲĄ─ĘĮ╩Į╩Ū▄øöž▓©ĘĮ╩ĮŻ¼╝┤ī¦═©ĢrŽ┬ś“▒█╣”┬╩╣▄╩╝ĮK▒Ż│ųķ_ĀŅæBŻ¼╔Ž ś“▒█╣”┬╩╣▄Ą─ķ_ĻPė╔PWM ą┼╠¢øQČ©ĪŻ╣”┬╩ķ_ĻP╣▄▓╔ė├HITACHI ╣½╦ŠĄ─╝»│╔╣” ┬╩ķ_ĻPŲ„╝■6AM15,Ųõā╚▓┐╝»│╔3éĆN ą═MOSFET ╣▄║═P ą═ MOSFET ╣▄Ż¼śŗ│╔ ╚²ŽÓ╚½ś“╣”┬╩ķ_ĻPļŖ┬ĘĪŻ┼c▓╔ė├┴∙éĆĘų┴óMOSFET ╣▄ŽÓ▒╚Ż¼ėą└¹ė┌╠ßĖ▀╝»│╔Č╚Ż¼ £p╔┘ļŖ┬Ę░Õ├µĘeŻ¼į÷╝ė┐╔┐┐ąįĪŻ├┐éĆMOSFET╣▄ūįĦ│¼┐ņ╗ųÅ═Č■śO╣▄Ż¼į┌MOSFET ╣▄ĻPķ]Ų┌ķgŲĘ┤Ž“└m┴„ū„ė├ĪŻ
╣”┬╩“īäė▓┐ĘųļŖ┬Ę┐“łD╚ńłD3 - 3 - 4╦∙╩ŠĪŻ
į┌┤╦┐žųŲĘĮ░ĖųąŻ¼╗¶Ā¢é„ĖąŲ„Ą─ą┼╠¢╝ėĄĮTMS320F2812 Ą─ ▓Č ½@ å╬ į¬ Č╦ ĪŻ īó ▓Č ½@ Č╦ įO ų├ ×ķI/O ┐┌Ż¼╚╗║¾▓╔╝»▓Č½@å╬į¬Ą─ļŖ╬╗ŪķørĪŻĖ∙ō■▓Č½@å╬į¬Ą─ļŖ╬╗Ūķør ┐╔ęį┼ąöÓļŖÖC╠Äė┌─ŪéĆģ^ķgĪŻĖ∙ō■ā╔┤╬▓Č½@Ą─Ģrķg┐╔ęįėŗ╦Ń│÷ļŖÖC▀\ąą╦┘Č╚ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |