| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦Š▀ėą╚½ĘĮ╬╗ęŲ äėĄ─╣”─▄Ż¼┐╔ęįį┌ā╔ŠSŲĮ├µųą╠ß╣®╚²ūįė╔Č╚Ą─▀\äėŻ¼─▄ē“į┌▓╗Ė─ūā╬╗ū╦Ą─ŪķørŽ┬Ž“ ╚╬ęŌĘĮŽ“▀\äėŻ¼ę“┤╦┐╔ęį╣Ø╝sĖ³ČÓĢrķgĪŻęįŲõ┤╦dėąĄ─▀\äėā×ä▌Ż¼╚½ĘĮ╬╗ęŲäėūŃŪ“ ÖCŲ„╚╦į┌▒ŖČÓŅÉą═Ą─ęŲäėÖCŲ„╚╦ųą├ōĘfČ°│÷Ż¼ę²Ų蹊┐š▀Ą─ÅVĘ║ĻPūóŻ¼▓óį┌įSČÓŅI ė“Ą├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├Ż¼▒╚╚ń╚½ĘĮ╬╗ęŲäė▌åę╬.RoboCup ▒╚┘ÉĄ╚ĪŻ▒Š╣Øęį╔Ž║ŻĮ╗═© ┤¾īWĄ─Ī░Į╗²łĪ▒RoboCup ųąą═ĮM╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦(Į╗²ł3╠¢JL-ó¾) ×ķ└²Ż¼╚ń łD3-5-1╦∙╩ŠŻ¼Š▀¾wšf├„ęŲäėÖCŲ„╚╦Ą─▀\äė┐žųŲŲ„╝░▀\äė┐žųŲĘĮĘ©Ą─æ¬ė├ĪŻ
ŽĄĮyĮYśŗĮķĮB
╚½ĘĮ╬╗ęŲäėÖCŲ„╚╦Ųõ▀\äėł╠ąą▓┐╝■ė╔░▓čbį┌ÖCŲ„╚╦Ą─Ąū▒P╔ŽĄ─3éĆ╚½ŠS▌å śŗ│╔.▌åūėų▒ÅĮ×ķ80mmĪŻÖCŲ„╚╦š¹¾wųž┴┐×ķ20kg, ÖCŲ„╚╦│▀┤ń×ķ45mmĪ┴45mmĪ┴
80mmĪŻ ╚²éĆ▌åūėĄ─┼õų├╚ńłD╩ŠŽÓ╗ź│╔120ĪŃĮŪŻ¼├┐éĆ▌åūėå╬dė╔ę╗éĆļŖÖC“īäėŻ¼ÖC Ų„╚╦Ą─▀\äėė╔3ų╗╚½ŠS▌åĄ─▐Däė║Ž│╔ĪŻ
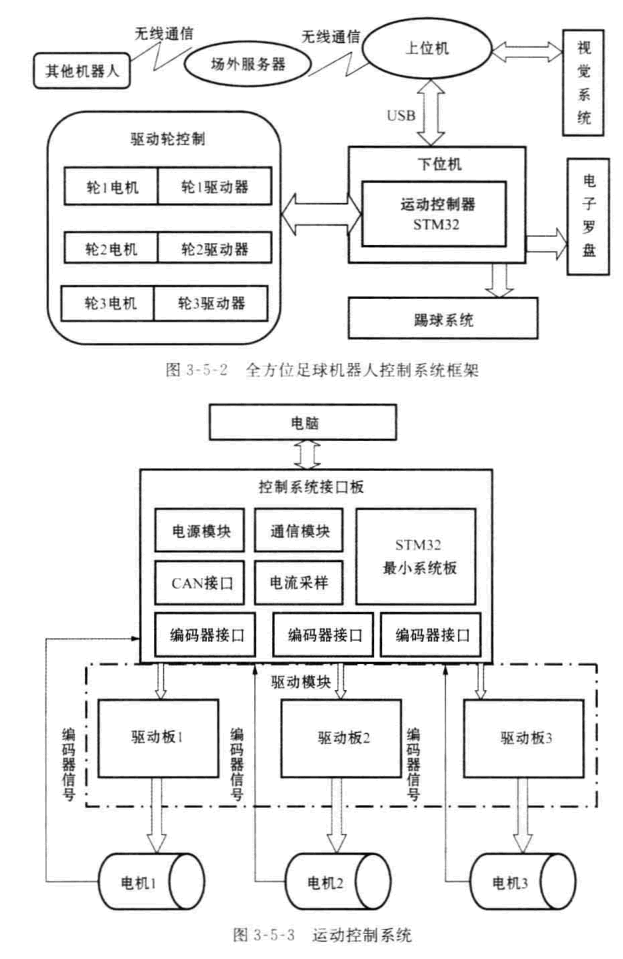
╗∙ė┌ąą×ķĄ─Ė▀īė┐žųŲŽĄĮyė╔ę╗┼_╣Pėø▒Š═Ļ│╔Ż¼▓╔ė├IPC ═©ą┼ÖCųŲ(Inter-Process Communication), īŹĢr½@╚ĪĖ„é„ĖąŲ„ą┼Žó▓ó▌ö│÷┐žųŲųĖ┴ŅĪŻ═¼ĢrŻ¼Ąūīė▀\äė┐žųŲė╔ STM32 ąŠŲ¼×ķ║╦ą─Ą─ARM ┐žųŲŽĄĮy═Ļ│╔Ż¼┐╔▀MąąļŖÖC┐žųŲĪó│ųŪ“║═ķ_Ū“┐žųŲ(┐ž ųŲų▄Ų┌×ķ1ms) ĪŻ Ė▀īė║═Ąūīė┐žųŲŽĄĮyų«ķg▓╔ė├▓©╠ž┬╩×ķ19.2 Kbps Ą─┤«┐┌═©ą┼ ģfūhŻ¼┐žųŲų▄Ų┌×ķ30ms ĪŻł÷═Ōėŗ╦ŃÖCū„×ķ▒╚┘É▓├┼ą╗“ĻĀ╬ķĮ╠ŠÜŻ¼░l│÷╚½ŠųųĖ┴ŅŻ╗Ė„ ł÷ā╚ÖCŲ„╚╦ęį╚½ŠųųĖ┴Ņ×ķųĖī¦Ż¼ūįäė▐DōQĮŪ╔½Ż¼Ė„ūį▓╔╚Īąą×ķĪŻ░³└©ł÷═Ōėŗ╦ŃÖCęį ╝░╦∙ėął÷╔ŽÖCŲ„╚╦Š∙▓╔ė├IEEE 802.11a ģfūh▀MąąŠųė“ŠW═©ą┼ĪŻŽĄĮy┐“╝▄łD╚ńłD 3-5-2╦∙╩ŠĪŻ
▀\äė┐žųŲŽĄĮyė╔═©ą┼─ŻēKĪóļŖį┤─ŻēKĪó┐žųŲ─ŻēK║═ļŖÖC“īäė─ŻēKĮM│╔ĪŻę╗ēKų„ ┐žųŲ░Õ(STM32) ┐žųŲ3ēK“īäėļŖ┬ĘŻ¼Ęųäe“īäė3éĆ╚½ĘĮ╬╗▌åŻ¼īŹ¼F3▌S┬ōäėĪŻ«öÖCŲ„╚╦╣żū„ĢrŻ¼═©ą┼─ŻēKžōž¤Å─PC ÖCĮė╩šųĖ┴ŅöĄō■Ż¼░³└©3éĆ▌åūėĄ─╦┘Č╚║═╩Ūʱ╠▀ Ū“┼ąöÓęį╝░╠▀Ū“┴”Č╚ĪŻ┐žųŲ─ŻēKīó3éĆ▌åūėĄ─╦┘Č╚░l╦═ĄĮ▀\äė┐žųŲ─ŻēKŻ¼▓ó«a╔· ę╗éĆ╠▀Ū“ą┼╠¢┐žųŲÜŌäė╠▀Ū“ŽĄĮy«a╔·╠▀Ū“äėū„ĪŻ▀\äė┐žųŲ─ŻēKät┐žųŲų°3éĆ▌åūė Ą─╦┘Č╚Ż¼▓óŪęīó═©▀^ķ]Łh▓╔╝»ĄĮĄ─ļŖÖC┤a▒Pą┼Žó½@Ą├Ą─3éĆ▌åūėĄ─╦┘Č╚Ę┤ü╗žPC ÖCŻ¼╣®ÖCŲ„╚╦╔Žīė▓▀┬į╦ŃĘ©╩╣ė├ĪŻŲõĮYśŗłD╚ńłD3-5-3ĪŻ═©ą┼─ŻēK║═▀\äė┐žųŲ─ŻēKĄ─CPU▓╔ė├Ą─╩Ū STM32F103CBĪŻ
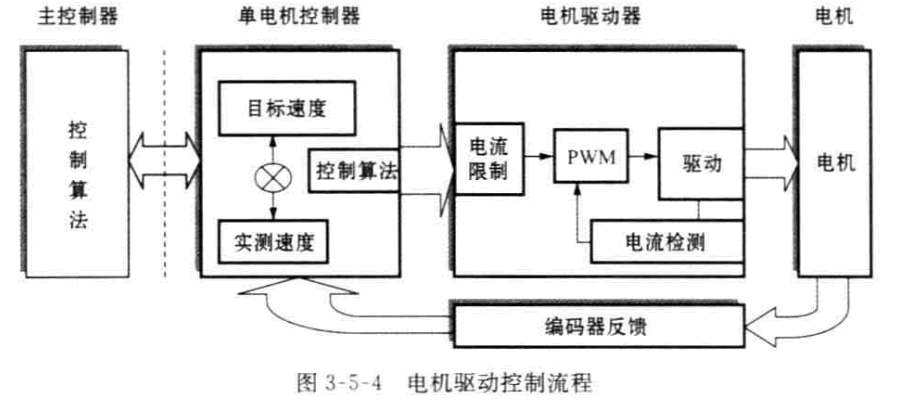
STM32 ▀\äė┐žųŲŽĄĮy═¼Ģr┐žųŲ3┬Ę╚½ĘĮ╬╗▌åĄ─┐žųŲŻ¼3┬Ęd┴óPWM ą┼╠¢┐ž ųŲų°ÖCŲ„╚╦Ą─3éĆļŖÖCĪŻ├┐éĆļŖÖCĄ─“īäė┐žųŲŽĄĮy╚ńłD3-5-4╦∙╩ŠĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |